

Busca de Produtos

PRODUTOS
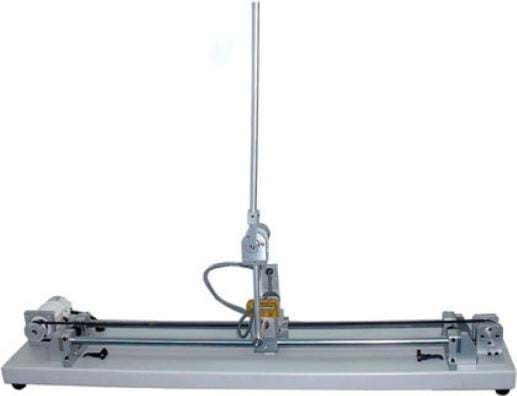
Sistema de controle de pęndulo invertido
Cód. IT-4426
PRINCIPAIS CARACTERÍSTICAS
Mais Detalhes do Produto
O pêndulo invertido é um sistema não linear instável, uma ideal plataforma de experiência para o ensino de teorias de controle e realização de vários experimentos de controle. Um pêndulo invertido é também uma área de pesquisa para muitos pesquisadores de teorias de controle moderno. Com um módulo de movimento linear, com uma plataforma de base, é fácil construir mais de 10 ensinos e experimentos de controle de plataformas, satisfazendo todas as necessidades.
Características:
- Sensores instalados a bordo
- Circuitos de controle instalados
- Drivers instalados
- Circuitos de proteção instalados
Características técnicas:
- Motor: DC
- Codificador óptico: 1000 linhas/revolução
- Potenciômetro
- Controlador de movimento inteligente
- Módulo de controle PID
- Módulo de codificador digital
- Módulo de fonte de alimentação DC
Experimentos incluídos:
- Classificação de pêndulo invertido
- Propriedades do pêndulo invertido
- Método de projeto do controlador
- Aplicação e princípio do codificador
- Modelo de sistema 1-fase Linear pêndulo invertido
- 1- Fase Linear IP Root Locus controlo experimento com resposta de frequência
- 1-Fase Linear pêndulo invertido
- 1- Fase Linear IP experimento de controle PID
- Experimento de controle PID
- Espaço de estado polo colocação experimento de controle
- Experimento de controle ideal LQR quadrático linear
- 1-fase Linear IP Swing experiência